Jan. 15, 2026
Bruno Mars: The Romantic Tour
Finale Zusatzshow | Bekanntgabe Superstar Bruno Mars hat kürzlich die Termine seiner The…





Fernsteuerung alleine per Kopfbewegung: Martin Jehle aus Jestetten hat an der Hochschule Konstanz – Technik, Wirtschaft und Gestaltung (HTWG) mit seinem Kommilitonen Frédéric Starnecker einen Roboter entwickelt, dessen Kameras alleine über die Kopfbewegung des Anwenders gesteuert werden. Damit haben sie sogar die Redakteure des Computermagazins c‘t begeistert.
Nicht umsonst haben Martin Jehle und Frédéric Starnecker ihr Werk „Nummer 5“ genannt. Der zirka 20 Zentimeter große Roboter erinnert mit seinen zwei Kameras auf einem langen Hals an die sympathische Filmfigur aus den achtziger Jahren. Doch der „Nummer 5“, der an der Hochschule Konstanz entwickelt worden ist, führt kein Eigenleben wie sein Namensvetter.
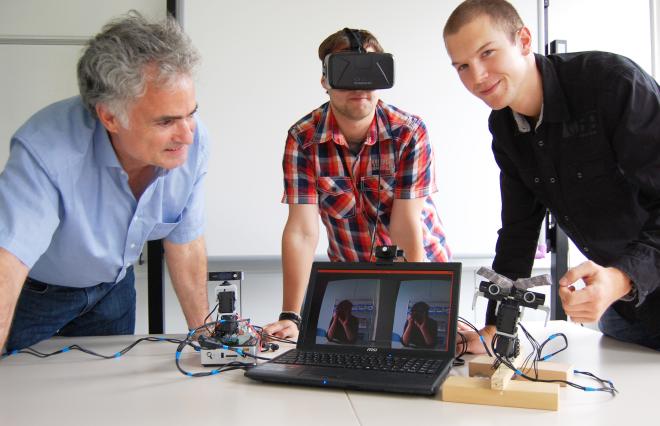 Die Studenten steuern, in welche Richtung der Roboter die Kameras ausrichtet - und dies alleine per Kopfbewegung. Möglich macht dies eine spezielle Brille, eine „Oculus Rift“. Sie zeigt das, was die „Augen“ von Nummer 5 sehen, in Echtzeit auf einem Bildschirm vor den Augen des Brillenträgers – ganz gleich, wo der Roboter unterwegs ist. Gleichzeitig werden die Kopfbewegungen des Brillenträgers direkt an „Nummer 5“ übertragen. Das heißt: Wendet der Träger der Brille seinen Kopf nach rechts, richtet auch Nummer 5 seine beiden Kameras nach rechts aus. Diese Möglichkeit, den Ort der Wahrnehmung zum Beispiel auf einen Roboter auszulagern, wird von Informatikern „moved reality“ genannt.
Die Studenten steuern, in welche Richtung der Roboter die Kameras ausrichtet - und dies alleine per Kopfbewegung. Möglich macht dies eine spezielle Brille, eine „Oculus Rift“. Sie zeigt das, was die „Augen“ von Nummer 5 sehen, in Echtzeit auf einem Bildschirm vor den Augen des Brillenträgers – ganz gleich, wo der Roboter unterwegs ist. Gleichzeitig werden die Kopfbewegungen des Brillenträgers direkt an „Nummer 5“ übertragen. Das heißt: Wendet der Träger der Brille seinen Kopf nach rechts, richtet auch Nummer 5 seine beiden Kameras nach rechts aus. Diese Möglichkeit, den Ort der Wahrnehmung zum Beispiel auf einen Roboter auszulagern, wird von Informatikern „moved reality“ genannt.
Da der Roboter mit zwei parallel stehenden Kameras bestückt ist, entsteht vor den Augen des Brillenträgers ein 3-D-Effekt. Verblüffend schnell wähnt sich der Brillenträger tatsächlich in der Landschaft, in der sich der Roboter bewegt. „Durch die Echtzeitübertragung der Bilddaten entsteht ein sehr realistische Eindruck“, betont Martin Jehle. Würde sich die Kopfbewegung und die damit geänderte Blickrichtung des Anwenders nicht sofort durch die entsprechende Bildfolge auf dem Display vor seinen Augen zeigen, würde dem Betrachter schnell übel werden. Dabei geht es um Millisekunden.
Vor allem in der Echtzeitübertragung per WLAN und der Positionsänderung bestand die Herausforderung, die Jehle in seiner Abschlussarbeit des Bachelor-Studiengangs Angewandte Informatik in der Vertiefungsrichtung Software Engineering zu bewältigen hatte. Sein Kommilitone Frédéric Starnecker dagegen hatte sich in der Vertiefungsrichtung Medieninformatik zur Aufgabe gemacht, die Bildübertragung um zusätzliche Informationen anzureichern. So können zum Beispiel definierte Gegenstände im Blickfeld von „Nummer 5“ auf dem Brillen-Display farblich hervorgehoben werden, Gesichter können aus einer großen Gruppe heraus erkannt und für den Betrachter markiert werden. „So wird die reale Welt noch um zusätzliche Informationen erweitert, wofür in der Informatik der Begriff „augmented reality“ steht“, erläutert Starnecker. Die möglichen Einsatzgebiete des Roboters sind vielfältig. „Vorstellbar ist zum Beispiel die Untersuchung eines verseuchten Landstrichs wie in Fukushima, wo sich Menschen nicht aufhalten sollten oder in schwer zugänglichen Regionen wie Höhlen“, erläutert Jehle. Der Vorteil der Entwicklung: Da die Kamerasteuerung per Kopfbewegung erfolgt, bleiben beide Hände des Anwenders für die eigentlichen Aufgaben frei. „Komplexe Roboter in der Forschung haben etliche Bedienelemente“, sagt Jehle, „wenn für die Kamerasteuerung die Hände nicht benötigt werden, ist dies eine große Erleichterung.“
Schon andere Entwickler haben diesen Vorteil erkannt und ähnliche Roboter entwickelt. An der Carnegie Mellon University in den USA wird gerade ein ähnliches System entwickelt, das nach diesem Prinzip Bilder vom Mond zurückschicken soll. Diese aber waren und sind wesentlich teurer. Vor allem dank der neuartigen Brille „Oculus Rift“ ist die Entwicklung der HTWG-Studenten preisgünstiger: Sie kostet zirka 280 Euro und kann an eine Anwenderstation, zum Beispiel einen Laptop, angeschlossen werden. Zudem sind ein Mini-PC als Kontrollstation, in der die Bild- und Tondaten des Kamerasystems bearbeitet werden, zwei Webkameras, kleine Servomotoren, die dem Roboter die Beweglichkeit über drei Achsen ermöglichen, und eine starke WLAN-Internetverbindung, die den Datenaustausch zwischen Kontroll- und Anwenderstation ermöglicht, nötig. Dazu kommt selbstverständlich die Arbeitsleistung der Studenten. Wieviel Zeit sie in die Programmierung gesteckt haben, können sie schwer beziffern. „Es ist in jedem Fall eine beachtliche Leistung, die komplette Server-Architektur zu entwerfen und umzusetzen“, sagt ihr betreuender Professor Oliver Bittel. Er sieht in der Abschlussarbeit eine sehr gelungene Kombination sämtlicher im Studium erlernter Kompetenzen. Auch Redakteure der Computer-Zeitschrift c’t waren beeindruckt und sahen die Entwicklung eines mehrseitigen Berichts würdig. Daraufhin haben die Studenten bereits Anfragen verschiedener Forschungseinrichtungen erhalten wie dem Forschungszentrum Jülich und der Uni Hamburg.
Martin Jehle und Frédéric Starnecker entwickeln ihren Roboter ständig weiter. Inzwischen haben sie ihn um die Tonübertragung – ebenfalls in Echtzeit - ergänzt. Frédéric Starnecker wird sich an der HTWG weiter mit der augmented reality und Autonomen Systemen (Roboter) beschäftigen. Er belegt nun den Master-Studiengang Informatik. Martin Jehle wird eine Arbeitsstelle antreten.